IRC: Hessian Predictor–Corrector (HPC)
Overview
The HPC method is a predictor–corrector IRC integrator in which the predictor step is based on second-order Hessian information. HPC combines a second-order local quadratic approximation (LQA) predictor with a high-accuracy corrector integration on a locally fitted potential-energy surface. This gives a favorable balance between computational cost and path quality.
Algorithm
At each IRC step, the HPC method proceeds in three phases:
- Predictor — Starting from the current IRC point, a predictor step is generated using the second-order LQA integrator in mass-weighted coordinates.
- Evaluation — The energy and derivative information are evaluated at the predicted point. Together with the data from the previous point, this information is used to construct a local fitted potential-energy surface.
- Corrector — A high-accuracy corrector integration is then performed on the fitted local surface, using a modified Bulirsch–Stoer scheme, to reduce finite-step deviation and obtain a point that more closely follows the IRC.
The Hessian is updated between steps using BFGS/Bofill update formulas to avoid expensive full Hessian recomputations at every IRC point.
Parameters
The complete HPCParams dataclass:
| Parameter | Type | Default | Description |
|---|---|---|---|
target_mode |
int | 1 | Index of the imaginary mode to follow. |
step_length_bohr |
float | 0.10 | Step length in Bohr. |
max_steps |
int | 50 | Maximum IRC steps per direction. |
euler_n |
int | 5000 | Number of Euler sub-steps for the predictor. |
hessian_recalc |
int | None | Recalculate Hessian every N steps. |
hessian_update |
str | bofill |
Hessian update: "bfgs" or "bofill". |
dwi_n |
int | 4 | Number of distance-weighted interpolation points. |
mbs_max_k |
int | 15 | Maximum polynomial order for modified Bulirsch-Stoer. |
mbs_points |
int | 20 | Number of MBS integration points. |
mbs_tol |
float | 1e-5 | MBS convergence tolerance. |
f_max_th |
float | 2e-3 | Max force convergence threshold. |
f_rms_th |
float | 5e-4 | RMS force convergence threshold. |
print_each |
bool | True | Print details at each IRC point. |
write_traj |
bool | True | Write trajectory XYZ files. |
Example: Dehydrohalogenation
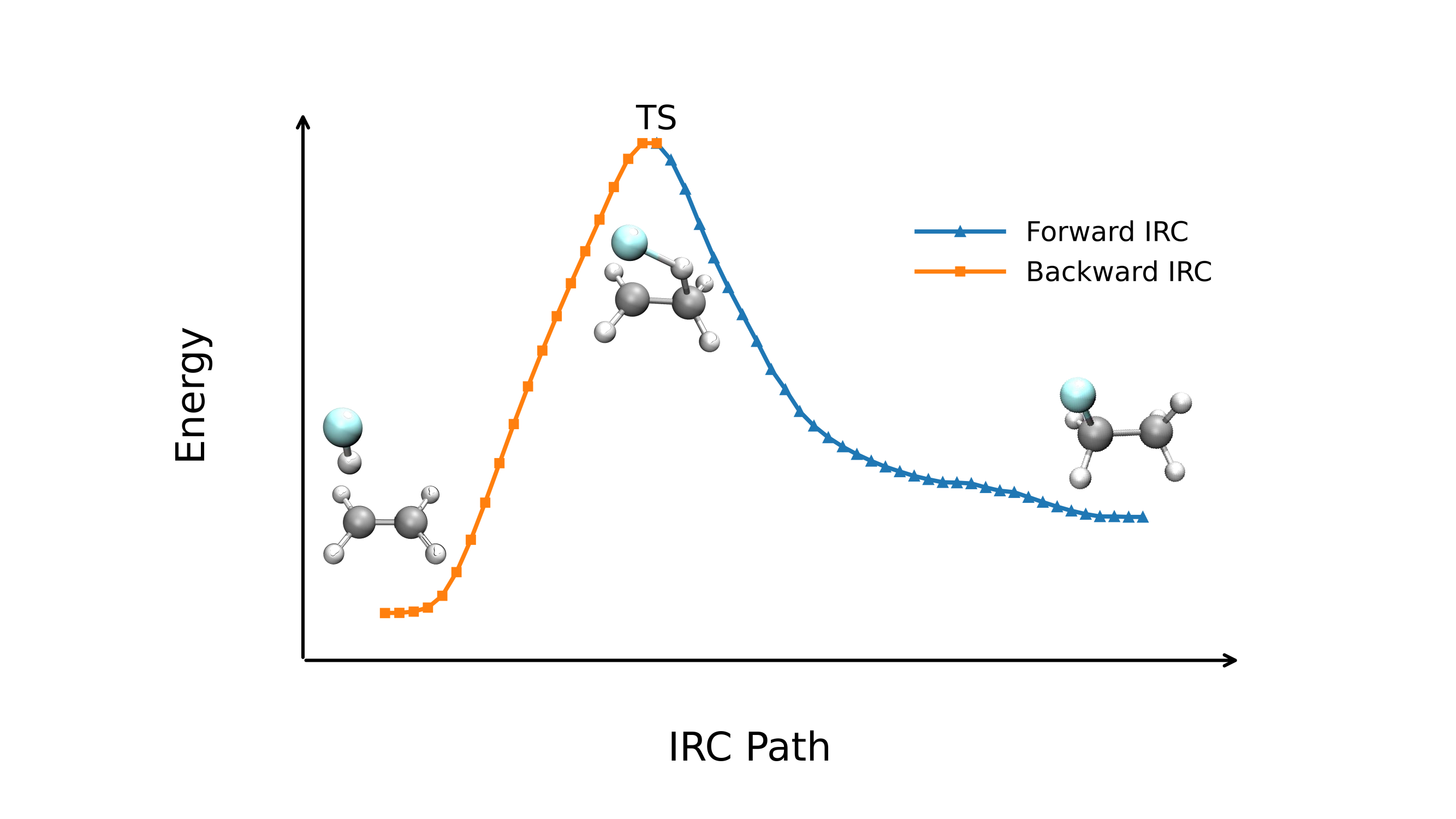
In this example, we will perform the calculations for the CH3CH2F -> CH2CH2 + HF reaction involved in the original HPC reference. The TS structure is derived via the String method. To speed up the calculation, a larger step size of 0.15 was used.
Input Example
#model=aimnet2
#irc(method=hpc,step_length_bohr=0.15)
#device=gpu0
XYZ /path/to/transition_state.xyzOutput Visualization
After a brief wait for the calculation to complete, we can visualize the reaction path and the energy profile along the reaction coordinate.
Ref Structure
Transition State
8
Image 0 Energy = -179.06046123
C -2.0232059669 -0.0727959625 0.0125441382
H -2.5203834295 -1.0371318543 0.0792584332
H -1.4508729125 0.0518015848 -0.9031470609
H -2.8291660857 0.9415420231 0.2594518458
C -1.5340413625 0.5058439206 1.1864655006
H -1.8281739484 0.1363239914 2.1573191103
H -0.7434990832 1.2406972886 1.1609842489
F -2.9083899697 1.8448367975 1.1744474484When to Use
The HPC method is recommended when:
- The GS method is too slow due to the number of constrained optimization required at each IRC point.
- You want a good balance between efficiency and path quality.
- The PES has moderate curvature changes along the reaction path, where Hessian-based integration provides a clear advantage over simpler gradient-only methods.
For very smooth surfaces where maximum speed is desired, consider LQA. For extremely difficult or anharmonic surfaces where robustness is paramount, consider GS.