IRC: Euler Predictor–Corrector (EulerPC)
Overview
EulerPC (Euler predictor-corrector) is a first-order predictor-corrector IRC integrator designed to achieve a favorable trade-off between computational cost and accuracy. Due to the first-order nature of the predictor step, EulerPC often requires smaller step sizes or a higher density of path points to reach a level of precision comparable to higher-order or Hessian-based methods (such as GS or HPC), which may lead to reduced efficiency in certain cases. However, it serves as a robust and practical alternative when Hessian-based methods are unavailable, computationally prohibitive, or numerically ill-behaved.
Like HPC, it uses the Modified Bulirsch-Stoer integrator on a DWI surface to refine the path.
Algorithm
At each IRC step, the EulerPC method proceeds in three phases:
- Predictor — Following an initial displacement along the transition vector corresponding to the imaginary frequency, an Euler predictor step is performed in mass-weighted coordinates.
- Evaluation — The potential energy surface derivatives are evaluated at the predicted point, and a locally fitted PES is constructed using information from both the starting and predicted points.
- Corrector — A correction integration is performed on this local surface to mitigate path deviations resulting from finite step sizes.
Parameters
The complete EulerPCParams dataclass:
| Parameter | Type | Default | Description |
|---|---|---|---|
target_mode |
int | 1 | Index of the imaginary mode to follow. |
step_length_bohr |
float | 0.10 | Step length in Bohr. |
max_steps |
int | 50 | Maximum IRC steps per direction. |
max_pred_steps |
int | 500 | Maximum predictor sub-steps. |
loose_cycles |
int | 3 | Number of initial cycles with loosened convergence. |
hessian_recalc |
int | None | Recalculate Hessian every N steps. |
hessian_update |
str | bofill |
Hessian update: "bfgs" or "bofill". |
dwi_n |
int | 4 | Distance-weighted interpolation points. |
mbs_max_k |
int | 15 | Max polynomial order for MBS. |
mbs_points |
int | 20 | Number of MBS integration points. |
mbs_tol |
float | 1e-5 | MBS convergence tolerance. |
f_max_th |
float | 2e-3 | Max force convergence threshold. |
f_rms_th |
float | 5e-4 | RMS force convergence threshold. |
print_each |
bool | True | Print details at each IRC point. |
write_traj |
bool | True | Write trajectory XYZ files. |
Example: Radical isomerization
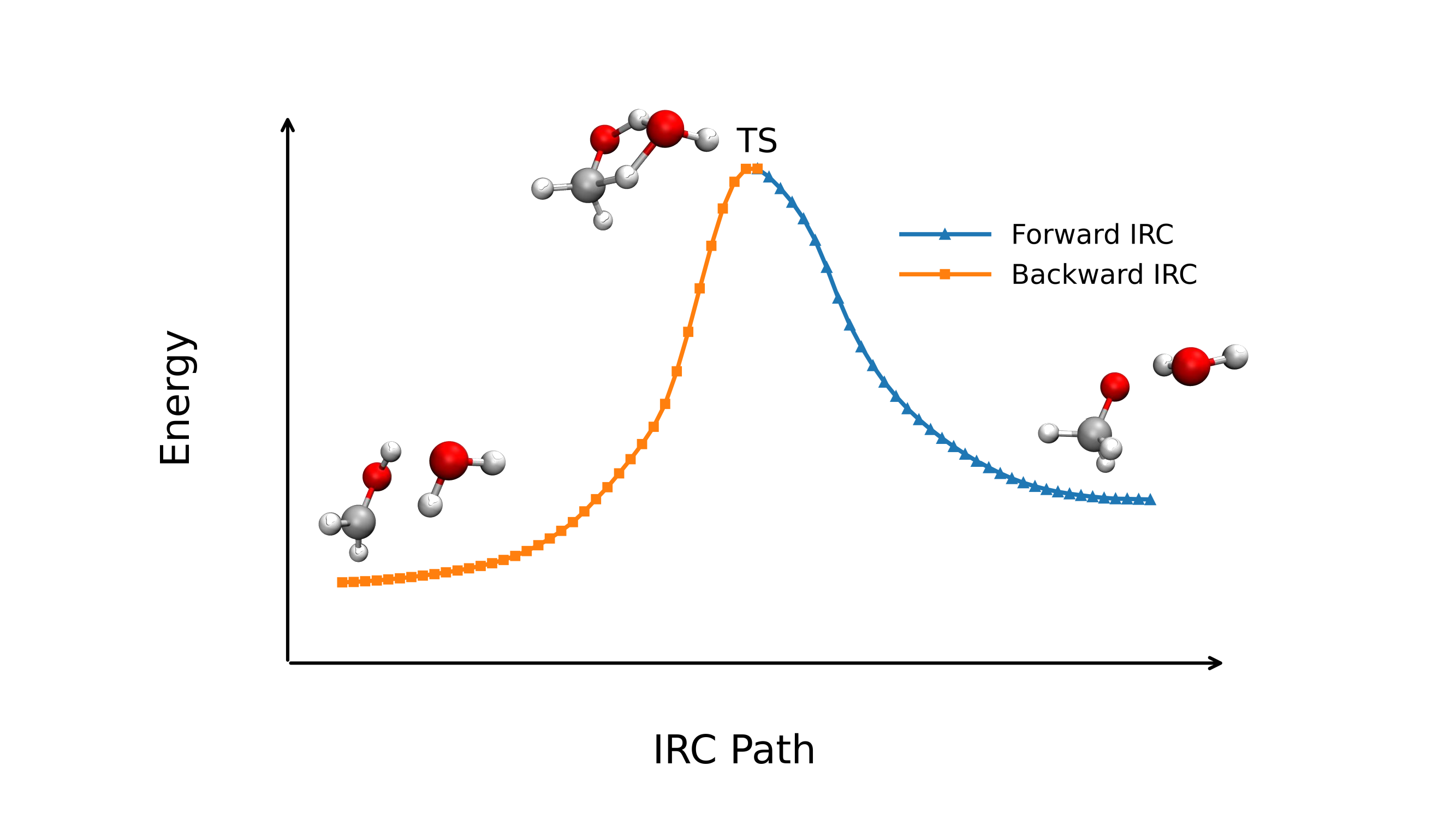
In this example, we will perform the calculations for the H2COH -> H3CO reaction involved in the original EulerPC reference. The TS structure is derived via the String method and the explicit water is considered to assist the reaction, with the system having a spin multiplicity of 2.
Input Example
#model=aimnet2nse
#irc(method=eulerpc)
#device=gpu0
XYZ 0 2 /path/to/transition_state.xyzOutput Visualization
After a brief wait for the calculation to complete, we can visualize the reaction path and the energy profile along the reaction coordinate.
Ref Structure
Transition State
8
Image 0 Energy = -191.55241663
C 0.2707493323 -0.8839208040 0.0593391556
H 0.8065677208 -2.2033699236 0.4439009220
H 0.8020890579 -0.6010813154 -0.8576257232
H -0.8079751217 -1.0413748042 -0.0556802194
O 0.7091869188 -0.3944101545 1.2167602799
O 1.3829694247 -2.5998174092 1.4932190528
H 2.3408200175 -2.6386038898 1.3632820341
H 1.1873343825 -1.4974192399 1.7123875960Comparison of IRC Methods
| Method | Speed | Robustness | Best For |
|---|---|---|---|
| GS | Moderate | High | General use and path curvature sensitive |
| LQA | Fast | Moderate | Smooth surfaces |
| HPC | Moderate | High | Balanced speed/accuracy |
| EulerPC | Fast | Moderate | Wish to use Euler's integral |
When to Use
The EulerPC method is recommended as a fallback when other IRC methods have difficulty:
- When the default HPC method, LQA, or GS fail to converge along the IRC path.
- For reactions involving large-amplitude motions or irregular PES regions.
For routine IRC calculations on well-behaved surfaces, the default GS method or the HPC method are generally preferred.